
応用
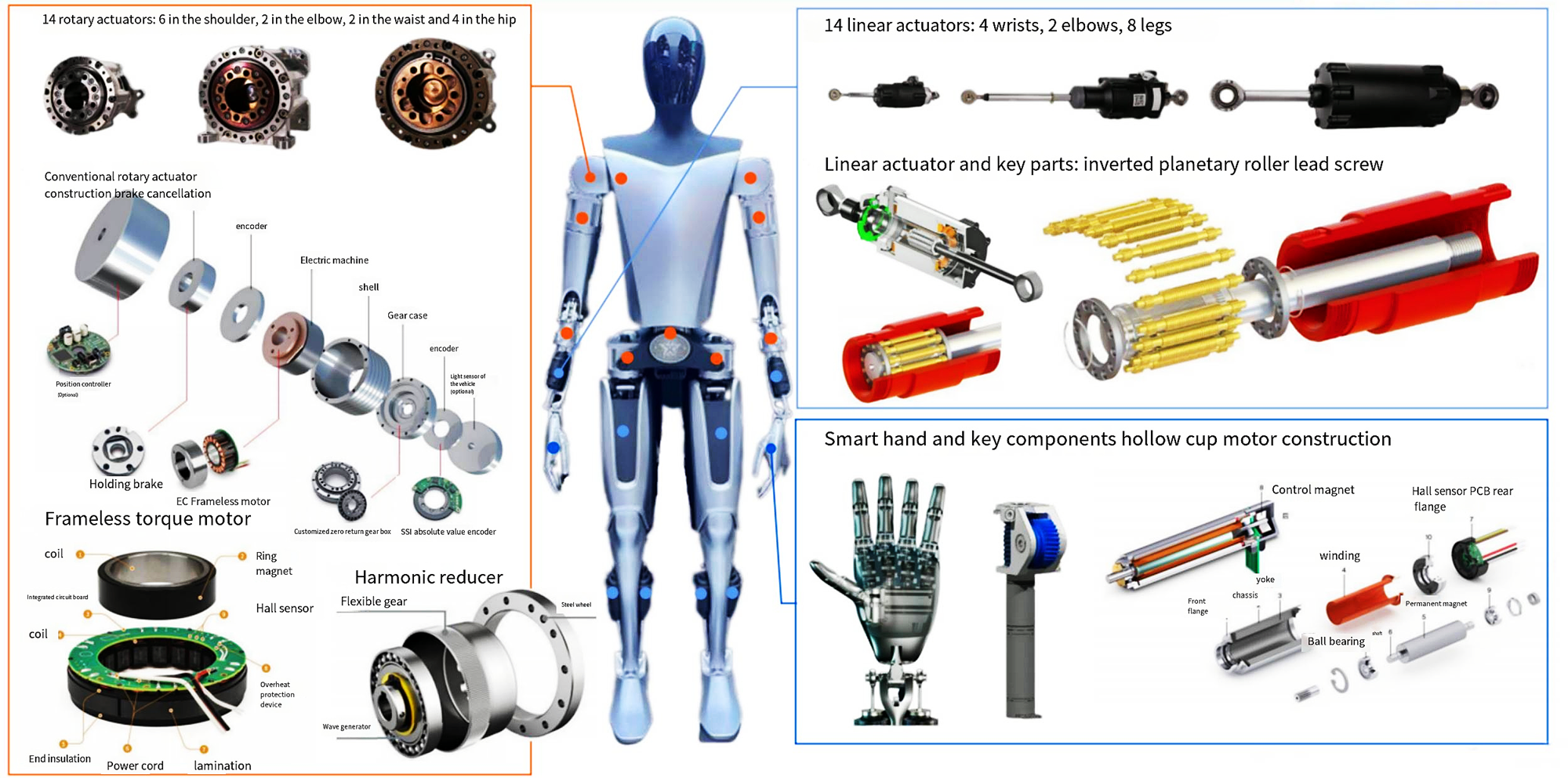
ヒューマノイドロボット
ヒューマノイドロボットでは、コアレスモーター、フレームレストルクモーター、遊星ギア減速機の応用が重要であり、さまざまなシステムや機能モジュールで独自の役割を果たします。以下に、それらの詳細な応用について説明します。
コアレスモーター
フレームレストルクモーター
遊星歯車減速機
コアレスモーターは、効率が高く応答が速いため、特に高精度と高速制御が求められるヒューマノイドロボットで広く使用されています。
関節駆動
センサーとアクチュエーター
柔軟性・軽量
コアレスモーターは、ロボットの指、手首、肘などの関節部分によく使用されます。このタイプのモーターは、慣性が低く、トルク密度が高いという特徴があり、高速回転と正確な位置決めを実現できます。
小型のコアレスモーターを使用して小さなセンサーやアクチュエーターを駆動することで、ロボットが外部環境を認識して微細な動きを実行する能力を向上させることができます。
コアレスモーターは軽量・小型なので、柔軟な動きや軽量設計が求められるヒューマノイドロボットに適しています。
フレームレストルクモーターは、高トルク、低速、大トルク出力などの利点があるため、強いトルクと安定性が求められるロボットの部品に広く使用されています。
主関節駆動
ダイレクトドライブシステム
スペース利用の最適化
腰、肩、股関節などの主要な関節では、通常、フレームレスのトルク モーターを使用して堅牢な動きを実現し、大きな負荷に耐えます。
フレームレストルクモーターは主にダイレクトドライブシステムで使用され、中間伝達機構を削減することで機械的損失を減らし、システムの信頼性と寿命を向上させます。
フレームレス設計により、モーターを構造に直接統合できるため、多くのスペースを節約し、コンパクトな設計を実現できます。
遊星歯車減速機は、トルクの増加と回転速度の低下によりモーターの出力性能を向上させ、ロボットのさまざまな運動システムに使用されています。
トルクの増幅
精密制御
スムーズな減速
モーターの出力軸とロボットのジョイントの間に遊星歯車減速機を追加すると、出力トルクが効果的に増加し、ロボットがより強力な動作を実行できるようになります。
減速機により、より細かい速度と位置の制御が可能となり、ロボットアームのエンドエフェクタなど、高い移動精度が求められる部品に適しています。
遊星歯車減速機はコンパクトな構造とスムーズな動作を特徴とし、振動や騒音に敏感なアプリケーションシナリオに適しており、ロボット全体の操作の安定性と快適性を向上させます。
アプリケーション
ロボットアーム:
手首関節にはコアレスモーターを採用し、高速かつ柔軟な動きを実現。肩の駆動にはフレームレストルクモーターを採用し、強力なトルクを実現。さらに遊星ギア減速機により、各関節の総トルク出力を増大。
バイオニックレッグ:
股関節と膝関節にはフレームレストルクモーターを採用し、高い負荷容量を実現し、遊星歯車減速機により正確な減速とトルク増加機能を提供します。
これらの駆動技術が連携して動作することで、ヒューマノイドロボットは複雑な動作、スムーズな動き、高効率な操作を実現し、産業オートメーション、サービスロボット、医療支援など、さまざまな分野でヒューマノイドロボットの幅広い応用を促進します。

お問い合わせ
*当社はお客様の機密を尊重し、すべての情報を保護いたします。